Welcome!
If I move, you move, just like that!
TL;DR; - I finished modeling joints in Fusion 360, found an up-to-date URDF Exporter, and Launched RViz, Gazebo (kinda!)
Setting up Joints:
I initially was following an older Fusion->URDF exporter script older Fusion->URDF exporter script and I overlooked that this script outputs for older ROS versions and uses catkin.
This doesn’t work for us because we’re on ROS Jazzy and are using colcon, so after succeeding with the older script (and failing at the end), I found this more recent script. Thankfully, it seems to be a fork of the original script I was using because all the same principles apply:
- We need to define a ‘base-link’ component.
- Component2 when defining a joint, must be the parent component.
Sharing is Caring:
I put the .stl files from the export on my google drive for people to download. Simply copy the meshes folder into /src/Hexapod_Robot_description/.
Initial Launch of RViz/Gazebo:
So I haven’t bridged over ROS topics to Gazebo or RViz yet. But you can see the model’s Joint Coordinate Frames and it’s Joint Range of Motion by running:
docker-compose up windows_command
Then on a diff terminal:
docker exec -it windows_command bash
RViz launch cmd
source /opt/ros/jazzy/setup.bash && source install/setup.bash && ros2 launch hexapod_model_description display.launch.py
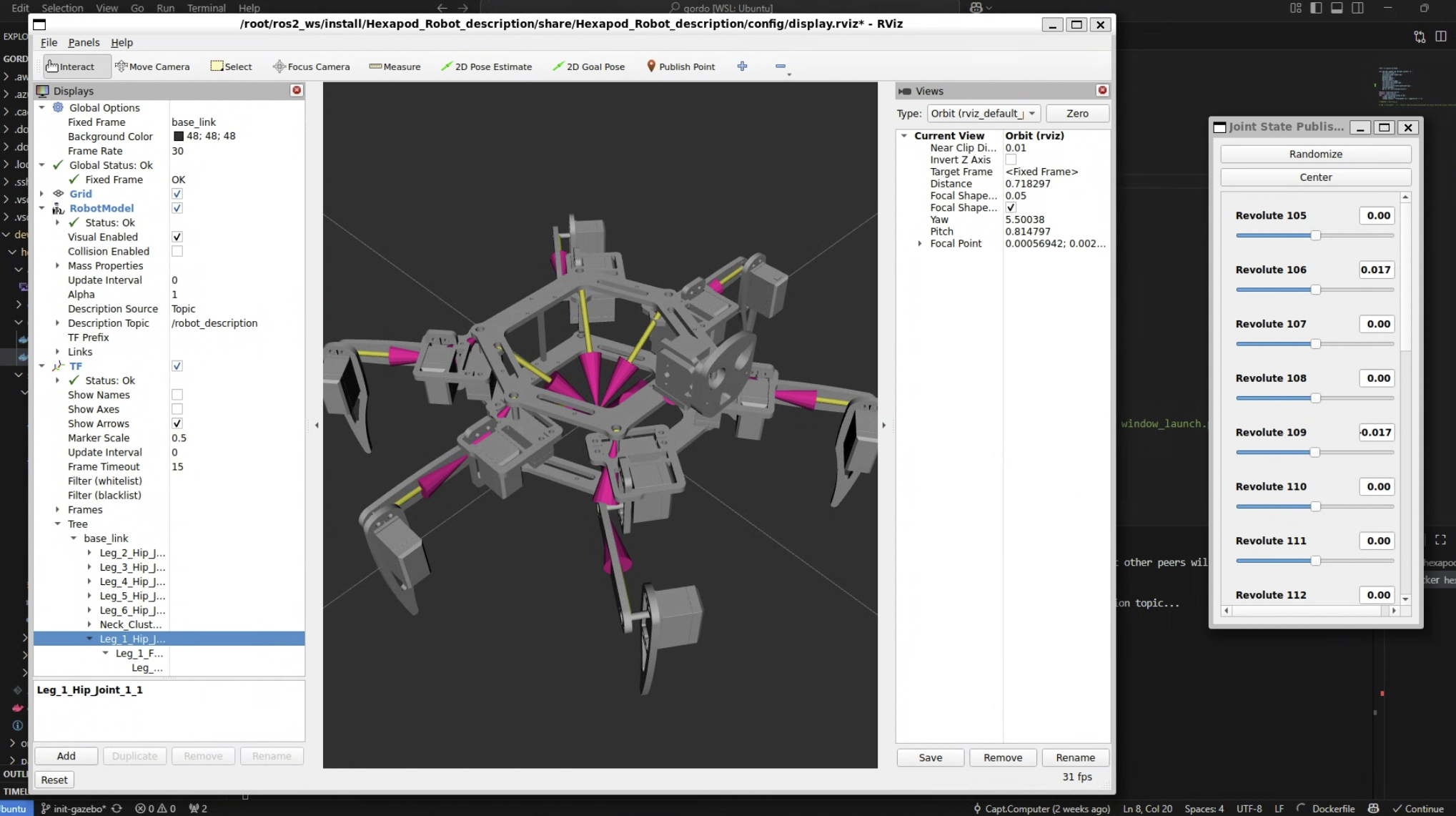
Something of note here:
I see the Joints using RViz’s joint-state-publisher-gui are init at 0.
But I modeled the robot at 0,0,90 - hip, hip, knee respectively (side note: I’ve been avoiding using spider anatomy terminology but maybe it’ll help… meh, we’ll see.)
My concern is the init position might be a pain in the but if I don’t nail it down early and get ROS, visualization tools, and my models to all agree.
Gazebo launch cmd
source /opt/ros/jazzy/setup.bash && source install/setup.bash && ros2 launch hexapod_model_description gazebo.launch.py
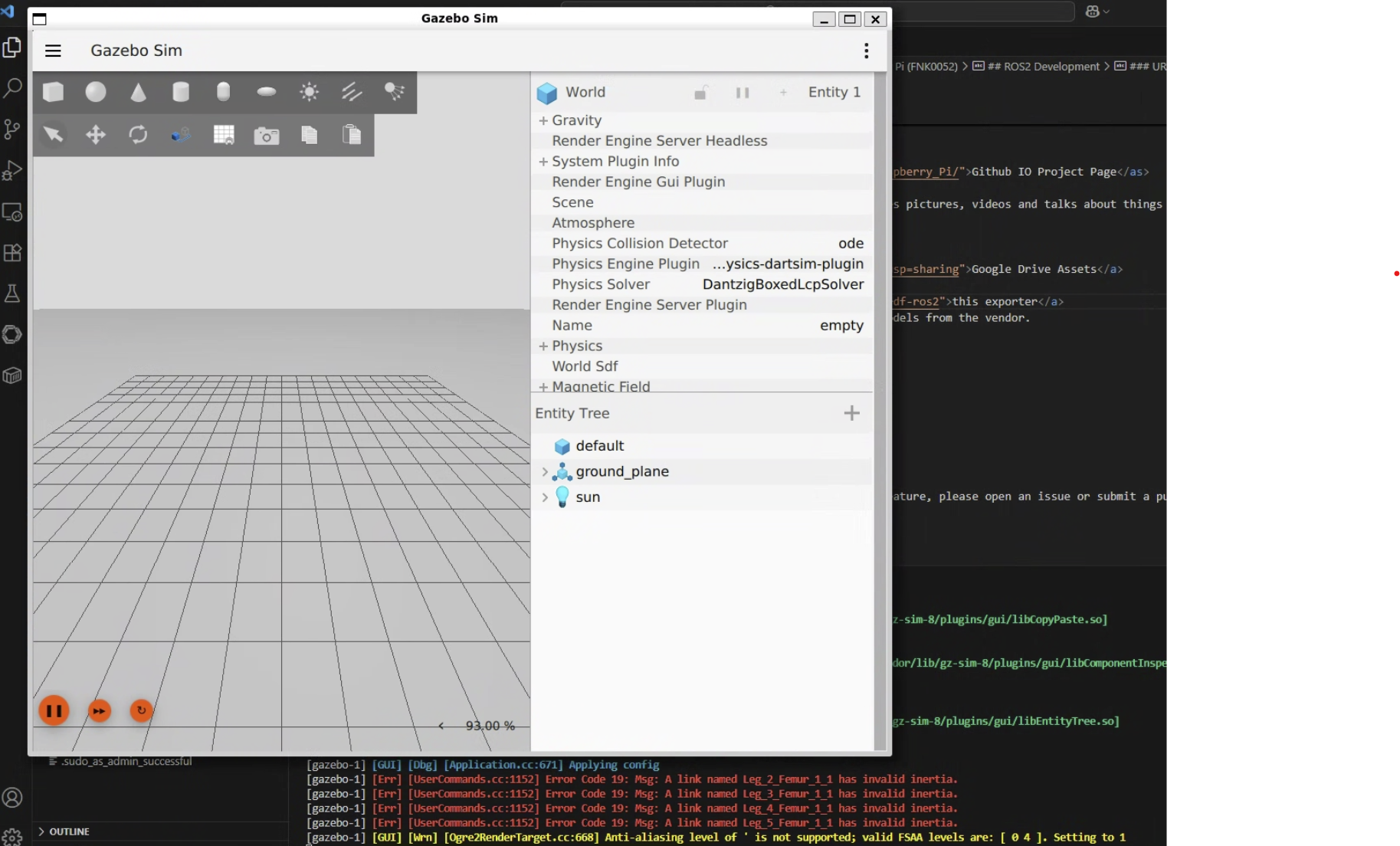
There are error msgs with the Leg*_Femur links having invalid inertia. So clearly this is because we skipped significant setup steps and we’ll just have to back track and iron these out! 💪
Next Steps
We still need to model the RealSense Depth sensor mount. Then print it or laser cut it. We also need to fix the Gazebo bug about inertia (and probably a lot more setup). We need to bridge ROS topics into Gazebo. We are working on doubling the battery life using the original battery mount.